


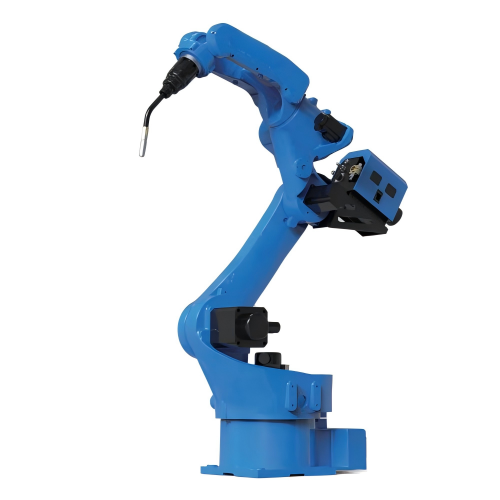
30 kg laadvermogen, reikwijdte van 1820 mm palletiseerrobot arm
CHINA
30 DAGEN
T/T
NINGBO/SHANGHAI-CHINA
| Model | QJRB30-1 | |
| Asnummer | 4 | |
| Lading | 30 kg | |
| Herhaalde positionering | ±0,05 mm | |
| Maximale armspanwijdte | 1820 mm | |
Palletiseerrobots vormen een hoeksteen van moderne geautomatiseerde productie- en logistieke systemen. Ze zijn ontworpen om producten zoals dozen, zakken en kartonnen dozen snel, nauwkeurig en consistent op pallets te laden en te stapelen. Deze robots verhogen de productiviteit, verlagen de arbeidskosten en verbeteren de veiligheid op de werkplek. Om te begrijpen hoe palletiseerrobots werken, moeten hun belangrijkste componenten, werkingsvolgorde, besturingssystemen en integratie in bredere productieomgevingen worden onderzocht.
1. Kerncomponenten
De typische palletiseerrobot bestaat uit verschillende hoofdonderdelen:
Robotarm: De centrale mechanische structuur die producten verplaatst en manipuleert. Deze heeft meerdere bewegingsassen voor flexibiliteit bij het nauwkeurig positioneren van producten.
Eindeffector (grijper): Het gereedschap dat aan het uiteinde van de robotarm is bevestigd. Afhankelijk van het producttype kan dit een vacuümgrijper, klemgrijper of vork zijn.
Basis en frame:Het fundament van de robot, dat zorgt voor stabiliteit en ondersteuning tijdens hoge snelheidsoperaties.
Visiesysteem (optioneel)Geavanceerde robots zijn voorzien van camera's en sensoren om de oriëntatie, grootte en plaatsingslocatie van producten te detecteren.
Regel- en aandrijfmotoren:Deze onderdelen sturen de bewegingen van de robot aan en leveren de kracht die nodig is voor de beweging.
2. Bedienen
De werking van een palletiseerrobot kan worden opgedeeld in een reeks geautomatiseerde taken:
Productidentificatie en afhalen: De robot identificeert een product op de transportband met behulp van vaste-positielogica of een visionsysteem. Vervolgens pakt hij het product op met de juiste grijper.
Verplaatsing naar palletlocatie:De besturing van de robot berekent het optimale pad en verplaatst het product naar een vooraf bepaalde locatie op de pallet.
Productplaatsing:De robot plaatst het artikel op de juiste positie en in de juiste richting, waardoor de palletstapel stabiel is.
Patroonherhaling:Dit proces herhaalt zich volgens het geprogrammeerde stapelpatroon (laag voor laag of in elkaar grijpend voor stabiliteit).
Palletruil:Zodra een pallet vol is, activeert het systeem een transportband of palletwisselaar om een lege pallet aan te voeren, waarna de cyclus opnieuw begint.
3. Programmering en configuratie
Palletiseerrobots worden geprogrammeerd met intuïtieve software waarmee operators stapelpatronen kunnen instellen, aanpassingen kunnen doen voor verschillende productformaten en palletafmetingen kunnen definiëren. Belangrijke configuratieopties zijn onder andere:
Stapelpatronen: Kolomstapel, onderling verbonden stapel of aangepaste indelingen om de stabiliteit van de lading en de ruimte-efficiëntie te maximaliseren.
Belastingaanpassingen: Aanpassingen van het productgewicht, de hoogte en het materiaal om schade tijdens het hanteren te voorkomen.
Snelheidsinstellingen: Variabele snelheden voor verschillende producttypen en productievolumes.
Sommige systemen maken ook gebruik van AI-gebaseerde optimalisatie om stapelstrategieën in realtime aan te passen.
4. Integratie in productielijnen
Palletiseerrobots zijn zelden stand-alone machines. Ze maken deel uit van een grotere geautomatiseerde workflow die het volgende kan omvatten:
Transportbanden: Lever producten af bij de ophaalzone van de robot.
Automatische wikkelaars: Zorg dat de afgewerkte pallets klaar zijn voor verzending.
Warehouse Management Systemen (WMS): Zorg voor tracking- en inventarisupdates.
Veiligheidssystemen: Zorg voor lichtschermen, noodstoppen en beschermende hekken.
Deze integratie maakt end-to-end automatisering mogelijk, van productie tot verpakking en distributie.
5. Veiligheid en naleving
Palletiseerrobots zijn uitgerust met diverse veiligheidsvoorzieningen om werknemers te beschermen en te voldoen aan internationale veiligheidsnormen:
Noodstopknoppen: Stop onmiddellijk alle handelingen als er een gevaar wordt gedetecteerd.
Lichtgordijnen en hekken: Voorkom dat onbevoegden of personen onbedoeld toegang krijgen tot het werkgebied van de robot.
Samenwerkingsfuncties (in cobots): Ingebouwde kracht- en snelheidsbeperkingen zorgen voor een veilige interactie met menselijke werknemers.
6. Voordelen
Als je begrijpt hoe deze robots werken, worden ook de vele voordelen ervan duidelijk:
Consistente prestaties:Robots worden niet moe en maken geen fouten, waardoor een constante kwaliteit wordt gegarandeerd.
Verhoogde doorvoer: Snellere werking dan handmatig palletiseren.
Arbeidsbesparing: Vermindert de noodzaak tot handmatige arbeid bij repetitieve, zware taken.
Minder productschade:Nauwkeurige behandeling minimaliseert breuk.
Ruimte-optimalisatie: Kan efficiënter worden gestapeld, waardoor opslagkosten worden verlaagd.
7. Onderhoud en diagnose
Geavanceerde palletiseerrobots beschikken over zelfdiagnostische tools en mogelijkheden voor bewaking op afstand. Ze waarschuwen operators voor:
Slijtage van mechanische componenten
Software-updates of kalibratiebehoeften
Noodfoutlogboeken voor probleemoplossing



SHENCHI ROBOT CO.,LTD biedt verschillende industriële robots met automatiseringsoplossingen. Wij ondersteunen industriële robots voor onder meer lassen, verven, hanteren, palletiseren, buigen en polijsten. Neem gerust contact met ons op.
© Shenchi Company Alle rechten voorbehouden.